Why Flying Points Happen
These artifacts come from a standard assumption: one depth per pixel. On flat regions this is fine. Near object edges, the pixel mixes evidence from both foreground and background, and the model can't tell which surface it sits on. So its true depth is ambiguous.
A one-depth model cannot represent this ambiguity. Its unimodal loss always demands a single answer, so training pulls the prediction to a value between the foreground and background depths. In 3D, that value lies on neither surface and becomes a floating point.
Point cloud · drag to orbit
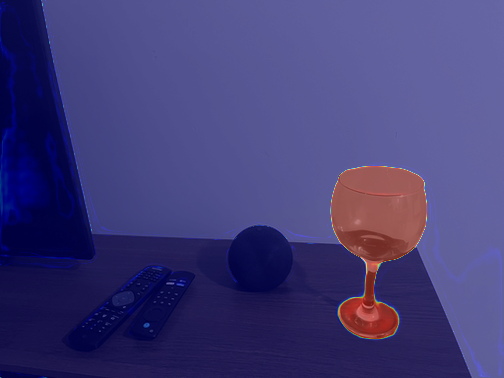
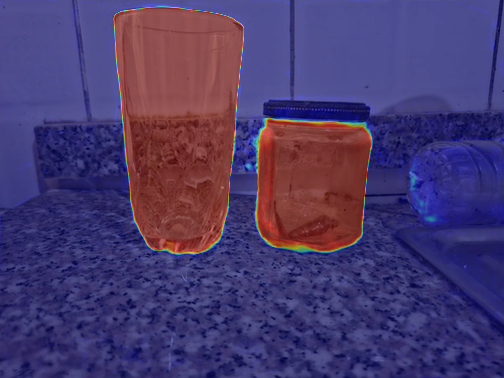
Click any red edge in the input
RGB · zoom
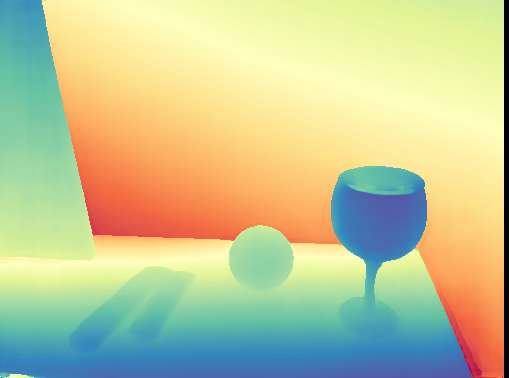
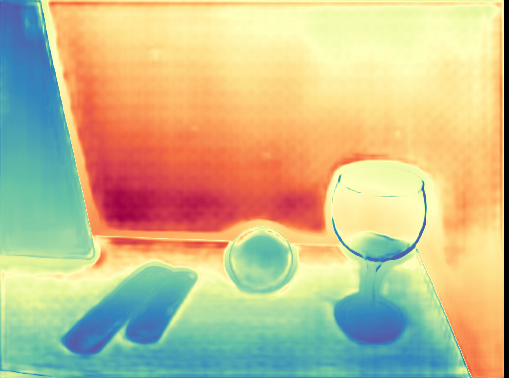
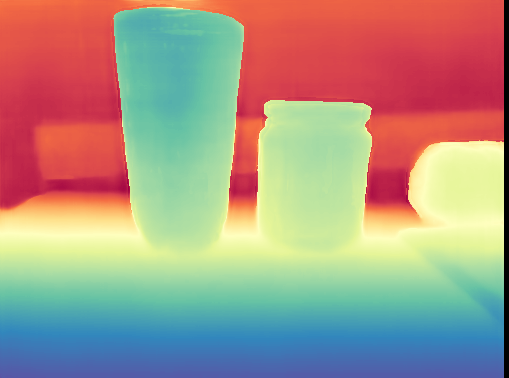
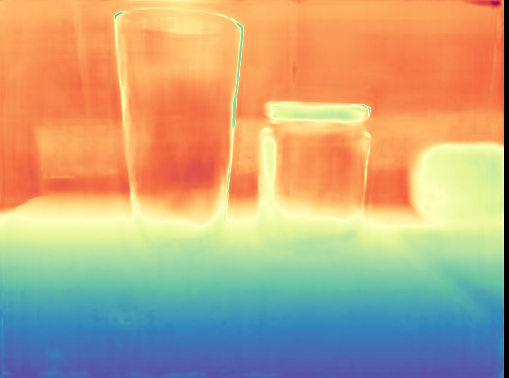
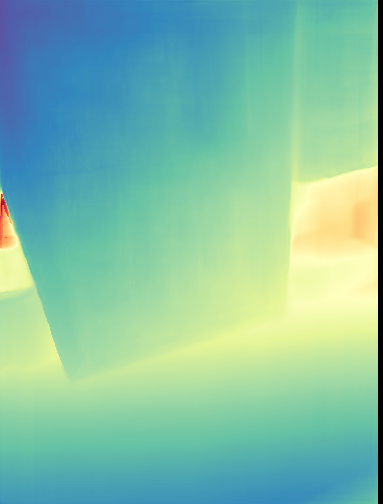
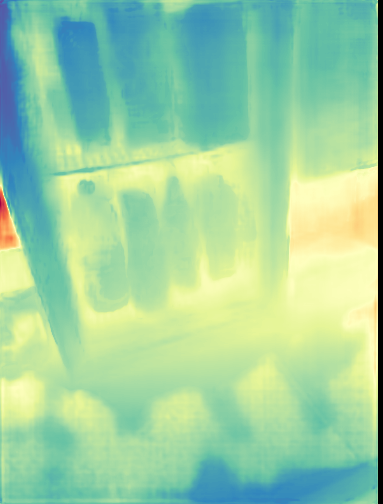
Depth · zoom